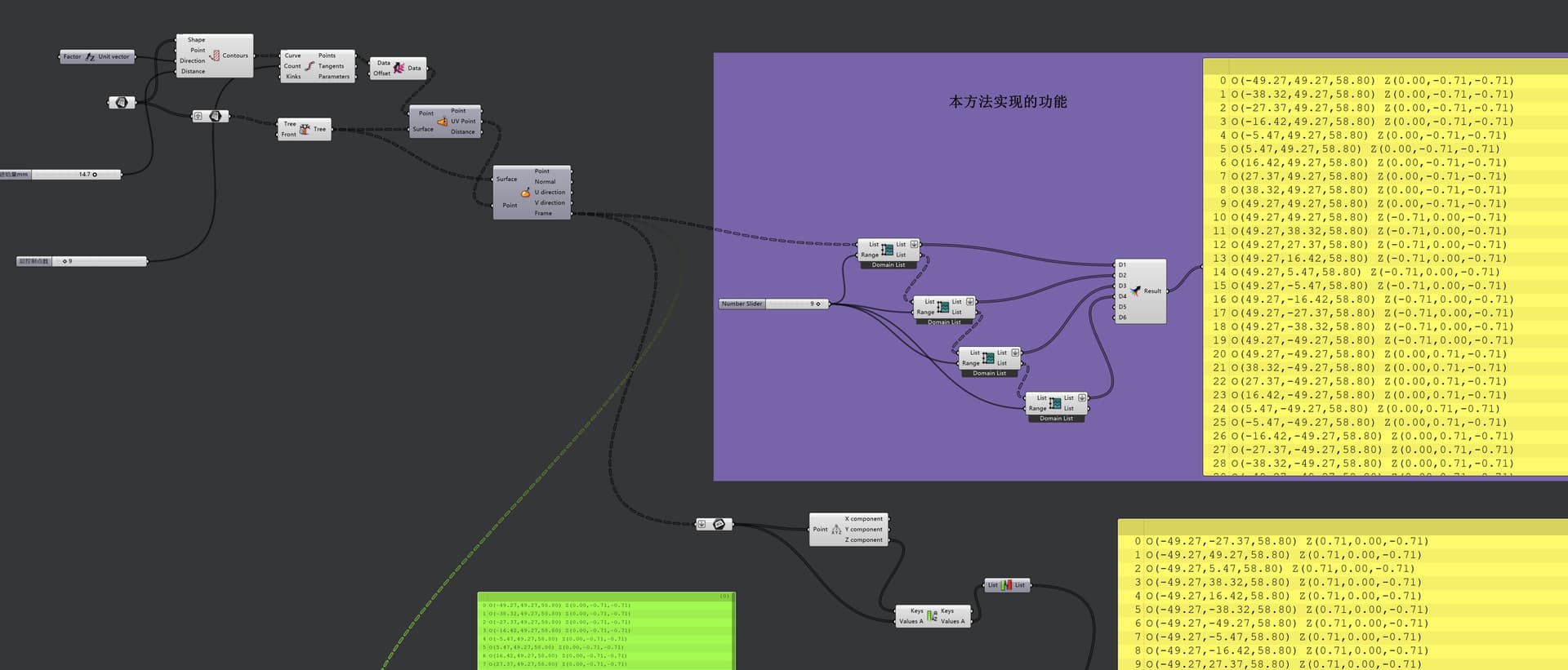
这组数据描述了一系列平面,我想把同一高度的平面按顺序排列起来,先排第一层的,紧接着在后面再排第二层的,直到排到最后一层,
上图中,右边的是我用笨方法,实现的效果,但是对于数据量比较大的时候,就没办法了,有没有新的数据分类合并的方法,谢谢了
哈哈不好意思 这是源文件,您看下 谢谢
测试变角度成形模型.3dm (42.1 KB)
测试变角度成形原理.gh (33.8 KB)
您好这样可以吗
测试变角度成形原理.gh (42.9 KB)
没看到一开始发帖的数据
你将Plane数据内置后只发送Plane即可
如果实在搞不清怎么做,按照我截图的方法就行
刚开始学尽量避免使用Viper这类插件
先将GH的基本操作掌握熟练
您好,实在不好意思,我还是没有弄出来,我把之前的数据也列出来了,不过那是一个中间数据,初始数据是评价曲面输出的那个Frame导出来的,我按照您的方法,连接了下,顺序还是和笨方法输出的数组不一样,麻烦您在看下,拜托了 ![]()
测试变角度成形原理.gh (22.6 KB)

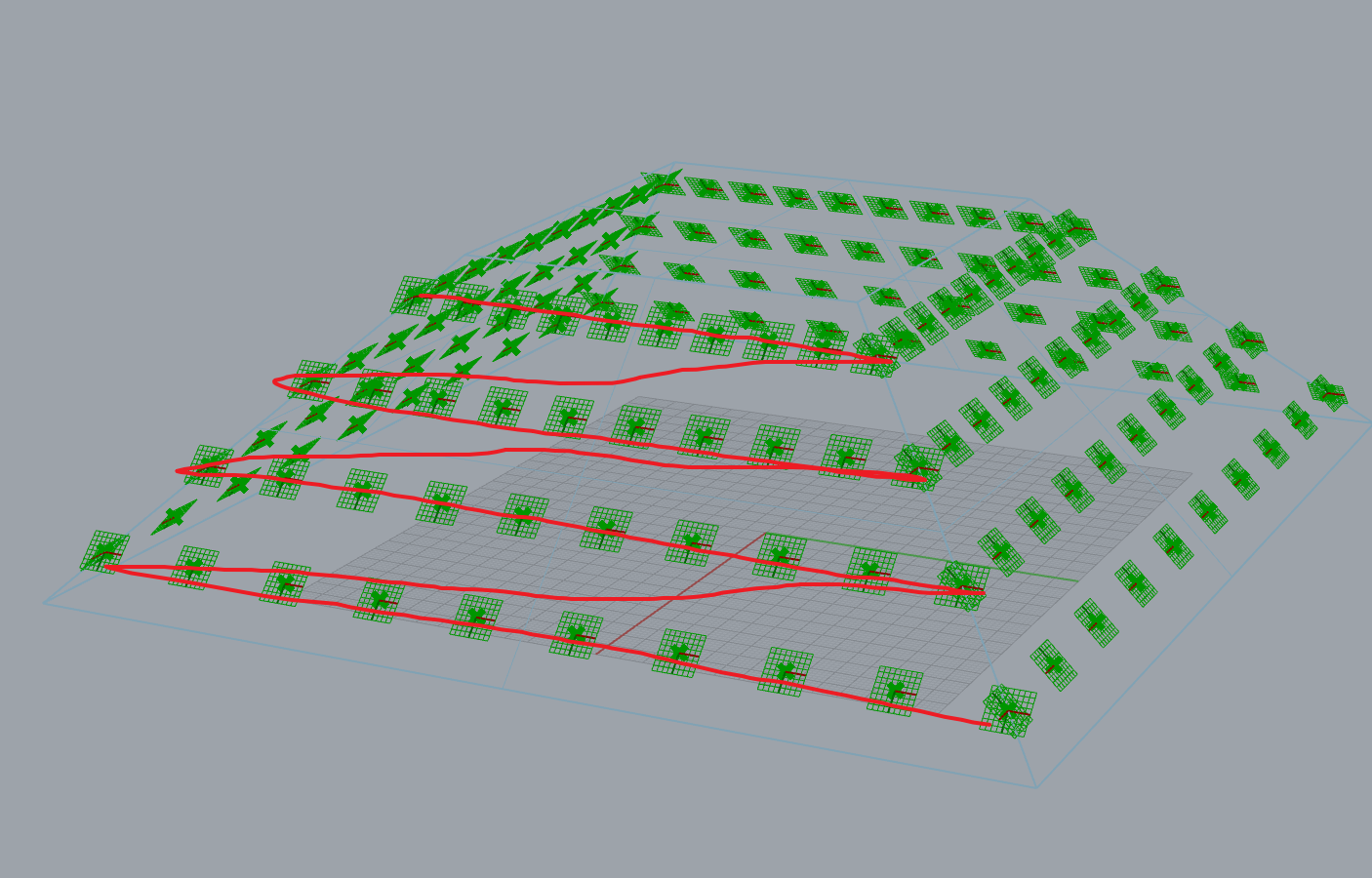
我想是同一高度的面按照顺序排完,在排下一层,不知道表达是否能够理解,因为,这个面后续要导入到机器人中的,他的轨迹必须这样走才行 ![]()
这个是我想要的排列顺序,现在问题我绝的可能就是数据分类,排序的问题了,但是这块对我这个初学者有点难了
转角处机器人怎么处理?在角落原地旋转吗?
为什么你的直线不给起点和终点呢?中间那么多点没有用的。机器人可以走直线
转角处 他可以自动最优插补过去,这个倒不是问题,对于这个模型确实每层给四个点走直线就行了,但是这个模型比较特殊,还会遇到还有带曲面和直面接起来的,我只是想找一个通用的解决办法 ![]()
您看看,有什么办法将曲面评估电池上Frame输出的数据,转换为需要的数据排列顺序吗? ![]()
理解了。我会按照通用方式做一个示范
你之前的分离surface的做法没啥大问题,符合转角插补的逻辑
十分感谢,我应该就差也一步骤了,再次感谢您 ![]()
TCP轨迹.gh (36.3 KB)
有几点需要注意
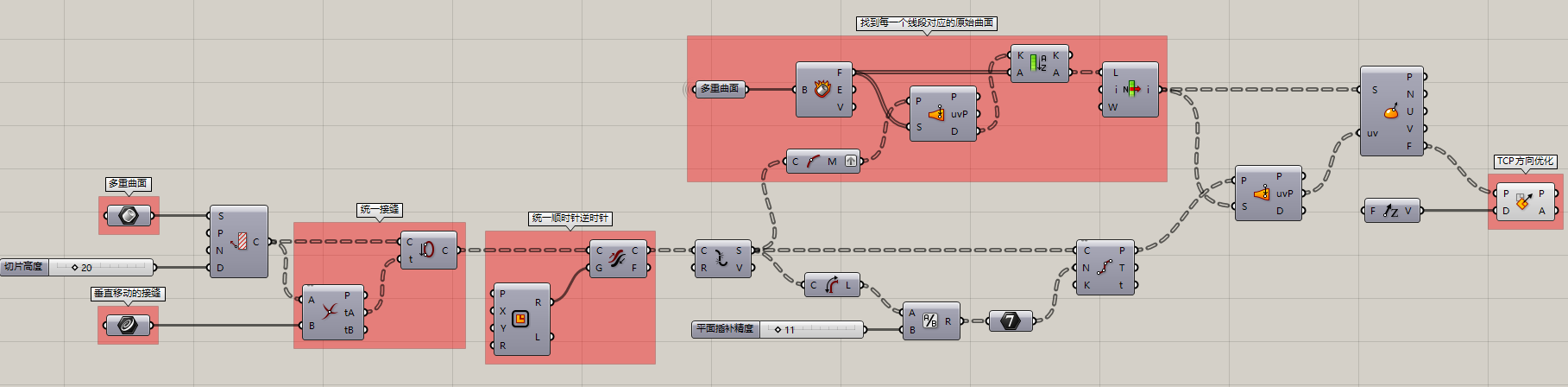
1:之所以一开始用Brep切等高线,后续再去重新找到每个小线段对应的曲面,看似步骤复杂。是为了应对不同Brep的情况,如果Brep很复杂,你也不希望手工一个个面按顺序选取。Brep切出来的线炸开后是按照确定顺序的。
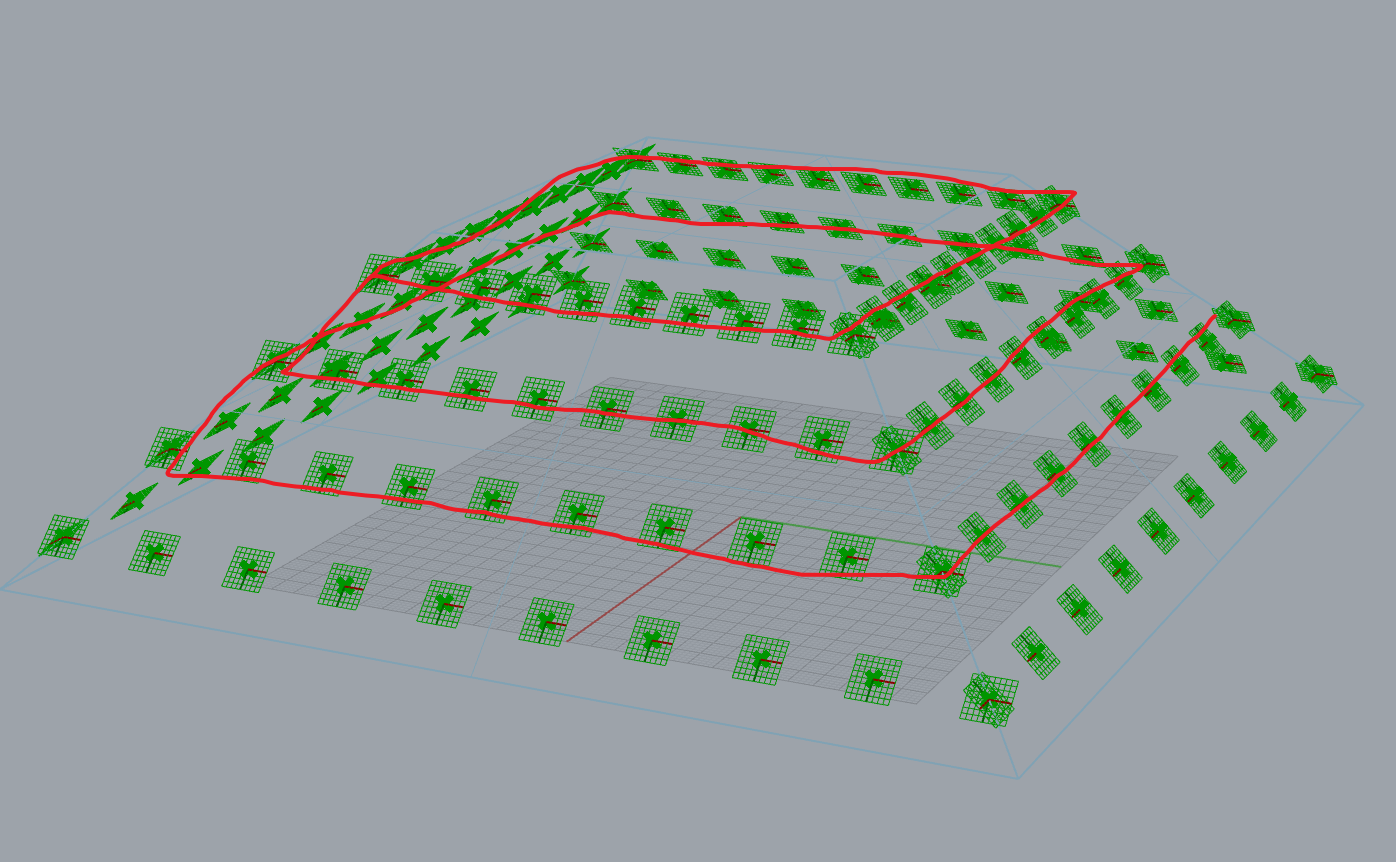
2:目前路径保留了两层,第一层是10个切平面,是最高一层的路径。第二层是每个面上的线段数量,目前是4。最后一层就是每个线段的插补平面。保留这两层结构是方便你在角落的地方和层间的地方做额外处理,例如修改关节速度等。
3:以我文件内的案例,曲面凹凸比较规则,最后Align plane可有可无。根据你最后工艺的实际需求决定是否需要Align或者采取别的处理,我这里加上Z的对齐详见下面的回帖。