最近看到有个bongo插件挺有意思的,就装了个试试看。
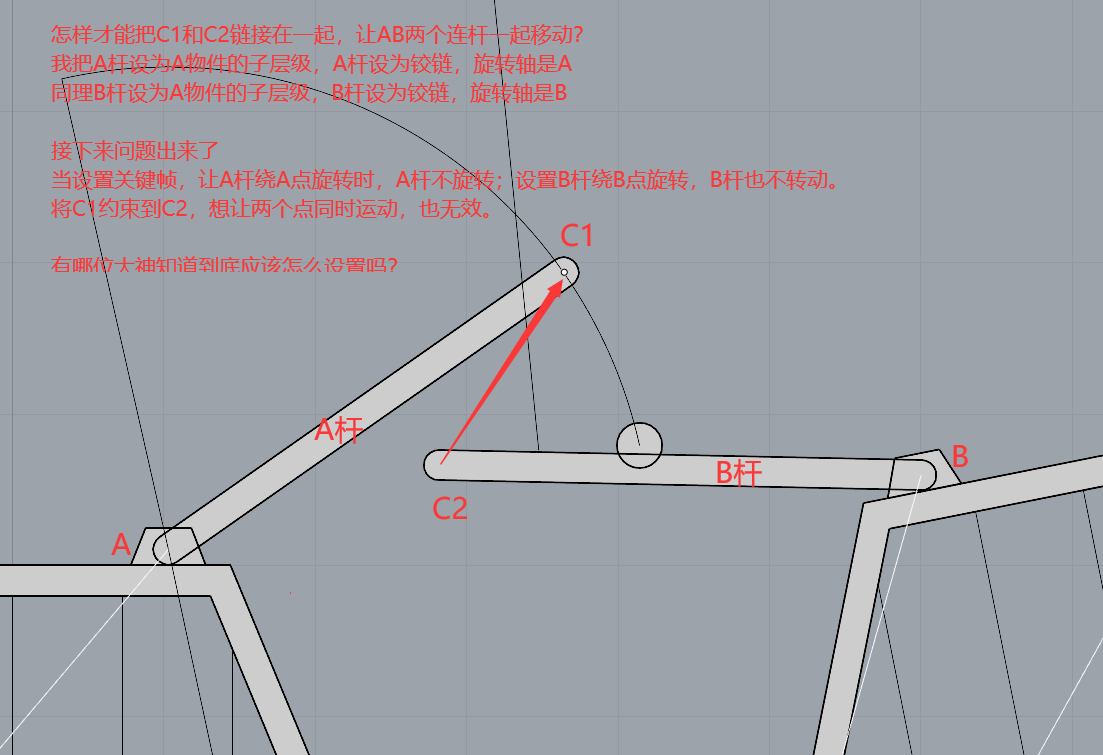
我做了个二维简化版伦敦桥,但是怎么才能把两根连杆链接在一起呢?
我搞一天了都没做成功,不知道哪里出了问题。不知道这里有没有人可以帮忙解答?
伦敦桥.3dm (380.3 KB)
最近看到有个bongo插件挺有意思的,就装了个试试看。
我做了个二维简化版伦敦桥,但是怎么才能把两根连杆链接在一起呢?
我搞一天了都没做成功,不知道哪里出了问题。不知道这里有没有人可以帮忙解答?
伦敦桥.3dm (380.3 KB)
请参考这里的教学
问题找到了,因为把A杆也设置成了部分IK链的“约束和关节”,如果仅设置为“关节”或者不做任何设置,反而没有问题。
不知道为什么B杆需要设置成“约束和关节”,使其固定在B点。A杆反而不能设置成“约束和关节”,让其固定在A点?
按照教学视频,新建一个文件,做简单连杆示意,一切都OK,没有问题
但是回到我的伦敦桥文件,A和C就没有办法建立约束,点击约束和选取点后,无反应。
就算新画几根线,按教程步骤,也无法建立约束。
删除所有物体的动画,重新设置,也是一样的结果:A/C无法建立约束联系。
真的不知道是怎么回事。
伦敦桥.3dm (187.6 KB)
你要用B带动C,然后驱动A?
首先,这个逻辑不对。因为B连接的物体是固定不动的,是A的转动,才带动了C,C又带动了B。
其次,如果一定设置BC带动A,会出现BC运动和A不同步的情况,虽然ABC的起点和终点位置一样,但是在运动过程中ABC会错开,并不是我想要的结果。
最后,现在的问题是AC根本无法进行约束,所以,不管A带动BC,或者BC带动A,两者都建立不了任何联动。
从你的 GIF 中看到,你并没有激活 IK 功能,因此看不到效果。
我检查了下你的绑定关系,没什么问题,激活 IK 功能后即可正常求解。
你的最终动画和你示意的绑定方法是一样的,但是这种仅限于做出动画效果,传动原理其实是错的:
如果按照原设计的机构传动原理,需要换个绑定思路,将蓝色的液压杆作为动画的驱动物件,也就是只对它K帧即可,其他的物件设置为铰链或者约束,然后做绑定,通过 Bongo 的 IK 求解器自动补齐它们的关键帧,动画应该是这样的:
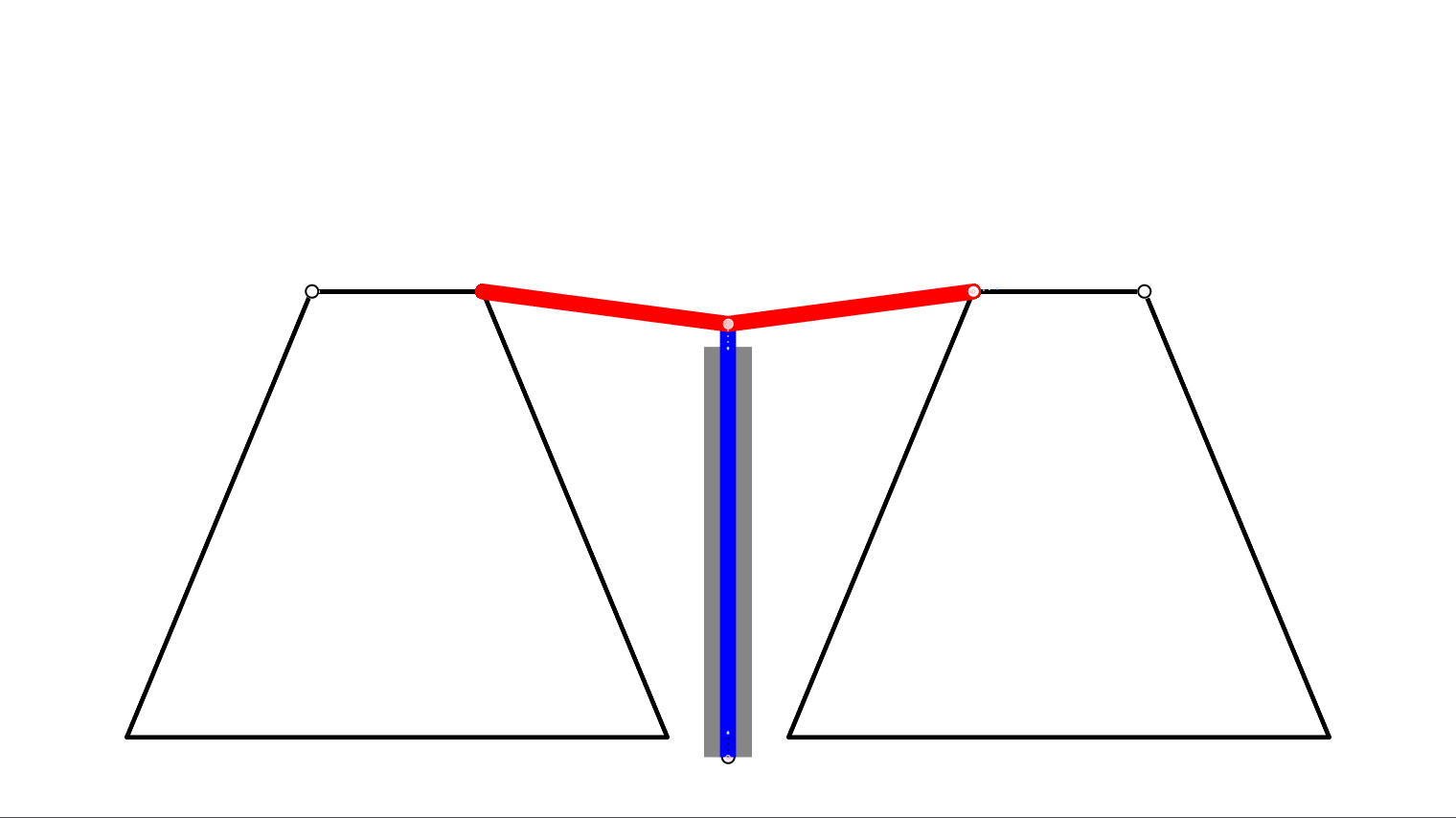
这是目前为止我能做到最好的一个结果,从正立面看,貌似一切完美。
但是在透视角度,会发现从第三组连杆开始,当旋转到一定角度的时候,液压杆会飞出来,而且距离正好就是桥宽。
实在搞不动了,不知道为什么会出现这样的错误?有没有大神帮忙解答一下
伦敦桥.3dm (1.2 MB)
对于这种复杂的动画,我们比较建议用线和点作为记录动画的物件,相当于模型的骨骼,绑定之前把线定义成图块,例如液压气缸筒、活塞杆、左右连杆、桥体的单元等等,方便后期往图块里面添加模型进去。
把骨骼的动画做完后没问题了,再往每个图块内添加模型,通常不会出问题。
简化成骨骼动画后,在设置基准点,对齐等操作时不容易出错,因为不用考虑模型厚度的问题,不会干扰到动画制作。如果是直接在模型基础上做也不是不行,就是需要仔细,比如基准点的位置要在透视视图中精确捕捉,避免导致错位等问题的出现。
你的动画都基本上完成了,遇到的这些小问题就需要在透视视图仔细检查下物件的基准点位置等等是否放置正确。
看到你的回复如同醍醐灌顶,一顿操作猛如虎,结果却惨不忍睹。好像那个实体动画是上天眷恋,才没有出大错。
我重新画了点线做骨骼,前面都正常,问题也是出在设置左右连杆和液压杆的动画上。
当设置第一组连杆,一切正常。当设置第二组,就开始出错了。把第二组连杆的动画删除后,第一组又正常了,搞不懂为什么。